



Office
With fast in-built hidden wireless phone chargers, office tables and computer desks can be your new power source with ONE POINTECH wireless chargers.
Furniture
With ONE POINTECH invisible wireless phone chargers, you can turn furniture into power sources and free your customers from messy wires and overloaded sockets.

Kitchen
A cordless kitchen will offer unprecedented flexibility to use kitchen space as needed—great for small kitchens.
Restaurant
With ONE POINTECH wireless charging spots seamlessly integrated with your bar, restaurant, cafe, or hotel, your guests can stay connected and charged at all times.

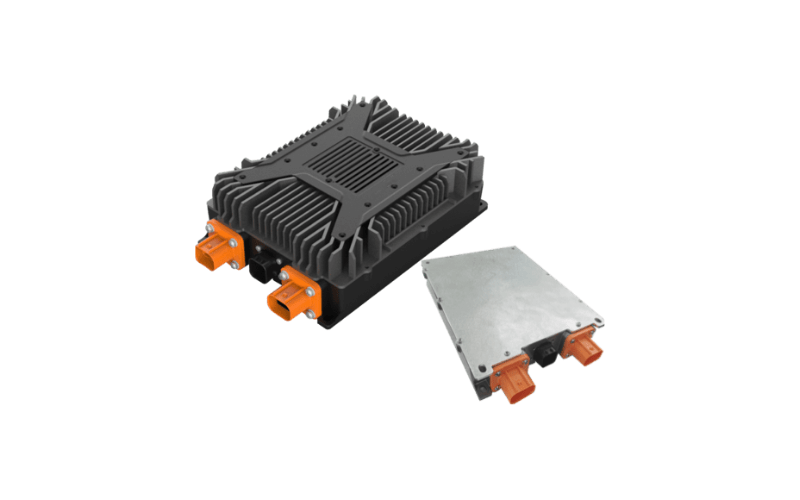
Light Electric Vehicles
LEV fast-charging enabled by wireless power transfer is here. ONE POINTECH provides charging solutions for ebikes, wheelchairs, golf carts, etc.
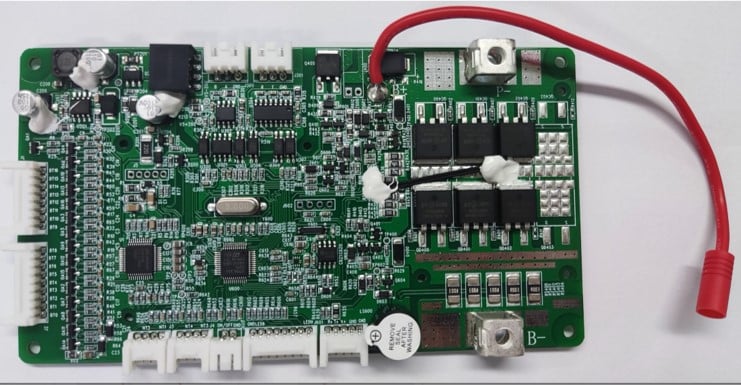
Industrial
ONE POINTECH offers a high-power wireless charging solution for robots, AGV, and AMR. Realizebe truly automatically charging without human intervention.
ByteDance Case Study
Haidilao Case Study
SITUATION
Bytedance has lots of offices worldwide. Everyday from various conference rooms teams connect with each other around the world. Bytedance wanted an elegant and efficient way to keep all mobiles powered up.
SOLUTION
ONE POINTECH offered ByteDance an easy solution: the Stealth Wireless Charger. It has been installed in various conference rooms in offices in Singapore, the USA and more.
IMPACT
The invisible wireless charger is appreciated by employees big time.